
In dieser neuen Serie von Blogbeiträgen sprechen wir über Beschleunigungsmesser in der IoT und der Flotten-Telematik. Beginnen wir mit den Grundlagen.
Eine der am meisten missverstandenen Komponenten in IoT-Geräten ist wahrscheinlich der Beschleunigungsmesser. Er wird oft mit einem Kompass, Gyroskop oder ähnlichem verwechselt. Es ist nichts Seltsames oder Magisches – ein Beschleunigungsmesser erfüllt einen bestimmten Zweck und kann nicht das tun, wofür er nicht entwickelt wurde.
In Telematikgeräten ist ein Beschleunigungsmesser typischerweise ein mikroelektromechanischer Sensor, der Beschleunigungen auf drei verschiedenen Bewegungsachsen messen kann – x, y und z, die jeweils das Nicken (auf und ab), das Gieren (von Seite zu Seite) bzw. das Rollen (um die Länge) darstellen. Der Beschleunigungsmesser arbeitet unermüdlich und misst diese Werte zwischen 100- und 400-mal pro Sekunde. Die hohe Rate ist notwendig, um die drei Bewegungen genau zu messen. Einige Beschleunigungssensoren können Hunderte g messen, aber normalerweise reichen 10-20 g aus. Die physikalische Komponente selbst ist klein, durchschnittlich etwa 2-3 Millimeter pro Seite, und sieht wie ein normaler Computerchip aus.
Ein Beschleunigungsmesser basiert seine Messungen auf einer festen Achse. Dies bedeutet, dass seine natürliche Achse von der Position kommt, wo er auf der Leiterplatte im Telematikgerät installiert wurde. Natürlich kann die Vektorrechnung die Daten, die von einer natürlichen Achse kommen, transformieren, aber dies erfordert normalerweise eine Form von Orientierungsprozess. Ohne Orientierung kann der Beschleunigungssensor dennoch für die unterschiedlichsten Zwecke eingesetzt werden. Solche Zwecke benötigen keine Bewegungsrichtung – eine Beschleunigungssumme kann über die verschiedenen Achsen berechnet werden, wobei der Effekt der Erdgravitation entfernt wird.
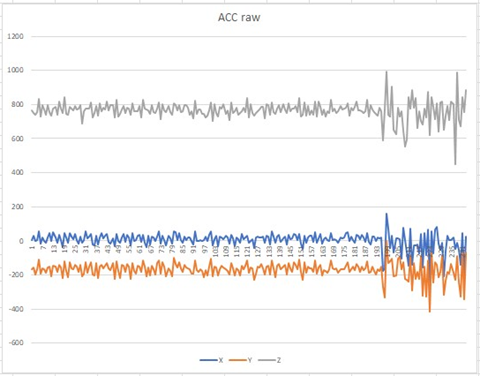
In der Abbildung oben sehen Sie die rohen Durchschnittsdaten (für einige Minuten) der drei Achsen einer Pkw-Installation. Zuerst steht das Fahrzeug entweder still oder es bewegt sich gleichbleibend, und dann gibt es eine leichte Bewegung.
Die Werte zeigen deutlich, dass die Daten roh und der Beschleunigungsmesser nicht orientiert ist, da die Schwerkraft, zwischen der x- und der y-Achse aufgeteilt ist. Ansonsten gibt es mehrere mögliche Interpretationen der Bewegung, die diese Daten erzeugt hat.
Ohne Orientierung können Sie:
- Weckmechanismen bei Bewegung einstellen
- Bewegung erkennen (bewegend / nicht bewegend)
- Stöße / Aufpralle / Treffer erkennen (Beschleunigungssumme bei einzelner Probe überschritten)
- Einfache Zusammenstöße erkennen (bestimmte Beschleunigungssumme über einen bestimmten Zeitraum überschritten)
- Übermäßige Vibrationen messen
Mit Orientierung können Sie:
- Beschleunigung und Bremsen erkennen
- Rigoroses Fahren (z.B. Rutschen, Driften, Sprünge und Unebenheiten) erkennen
- Vorfälle (Zusammenstöße) aufzeichnen
Berücksichtigen Sie diese Faktoren bei der Suche nach einem Beschleunigungsmesser:
- Ihr Zweck – was brauchen Sie?
- Abtastrate – 100 Hz reichen in der Regel für IoT aus
- Messskala – ±10g ist in der Regel ausreichend
Zusammenfassend lässt sich sagen, dass die grundlegendste Verwendung eines Beschleunigungsmessers Antworten auf die Fragen “Gab es eine Bewegung?” und „Falls ja, wie groß?” gibt. Dies ermöglicht bereits viele Möglichkeiten, einen Beschleunigungsmesser in einem IoT-Gerät zu nutzen.
Beschleunigungssensoren sind in allen Aplicom-Produkten enthalten. In unseren kommenden Blogbeiträgen werden wir weitere Details über Beschleunigungssensoren in unseren Produkten teilen
Dieser Blogbeitrag ist der erste von drei Teilen dieser Serie. Im zweiten Teil gehen wir auf die Orientierung ein und stellen weitere Beispiele vor.
Bleiben Sie dran!

Der Autor dieses Artikels ist Atri Vainikainen, Aplicoms Produktentwicklungsleiter
Folge uns auf Social Media