
In this new series of blog posts, we are going to talk about accelerometers within IoT and fleet telematics. Let’s begin with the basics.
One of the most misunderstood components in IoT devices is probably the accelerometer (ACC). It is often mistaken or confused with a compass, gyroscope or something like that. There’s nothing strange or magical about it – an ACC has a specific purpose and cannot do what it was not designed to do.
In telematics devices, an accelerometer is typically a micro-electro-mechanical sensor capable of measuring accelerations on three different axes of movement – x,y and z, each of which represents pitch (up-and-down), yaw (side-to-side) and roll (around the length) respectively. It will work tirelessly, measuring these values anything from 100 to 400 times per second. The high rate is necessary because it’s the best way to accurately gauge the three movements. Some ACCs can measure up to hundreds of gees, but usually 10-20 gees is enough. The physical component itself is quite small, averaging some 2-3 millimeters per side, and looks like a normal computer chip.
An accelerometer bases its measurements on a fixed axis. This means that its natural axis comes from the position in which it has been installed on the circuit board inside the telematics device. Of course, vector calculus can transform the data coming from a natural axis, but this usually requires some form of orientation process. Without orientation, the ACC can still be used for a wide variety of purposes. Such purposes don’t need the direction of motion – an acceleration sum can be calculated over the different axes, with the effect of the Earth’s gravity removed.
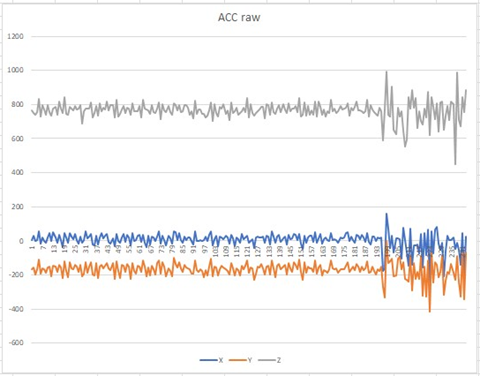
In the image above, you can see the raw average data from the three axes for a few minutes on a passenger car installation. At first, the vehicle is either at standstill or steady motion, and then there is some slight movement.
The values clearly demonstrate that the data is raw and the ACC is not orientated, as gravity is split between the x and y axes. Otherwise, there are multiple possible interpretations of the movement that produced this data.
Without orientation, you can:
- Wake up to motion
- Detect motion (moving / not moving)
- Detect shocks / bumps / hits (acceleration sum exceeded on single sample)
- Detect simple crashes (certain acceleration sum exceeded over certain time)
- Measure excessive vibrations
With orientation, you can:
- Detect acceleration and braking
- Detect harsh driving (i.e., sliding, drifting, jumps and bumps)
- Record incidents (crashes)
Consider these when looking for an ACC:
- Your purpose – what do you need?
- Sampling rate – 100 Hz is usually enough for IoT
- Measurement scale – ±10g is usually sufficient
In sum, the most basic use of an accelerometer is to answer the questions “Has there been movement?” and “If so, how much?” This already allows plenty of ways to utilise an ACC in an IoT device.
Acceleration sensors are in all Aplicom products. In our upcoming blog posts, we will share some more details about how we use acceleration sensors in our products.
This blog post is the first part of a series of three. In the second part, we shall continue with orientation and present further examples.
Stay tuned!

The author of this blog post is Atri Vainikainen,
Aplicom’s Product Development Director
Seuraa meitä sosiaalisessa mediassa